



—–Њњ
—–Њњ
![]()
![]()

vol. 31
є§—І‘Ї ЩC–µѕµ „Љљћ Џ
ЁзћпўF„”£®Takako Yoshida£©
•н•№•√•»§дAI§ќ∞k’є§Ћ§и§к°Ґ»Ћйg§»ЩC–µ§»§ќ»ЏЇѕ§ђяM§у§«§§§л°£§љ§м§Ћ∞駧°Ґ∞≤»Ђ?њмяm§ ≤ў„ч§д ¬є ∞k…ъХr§ќЎЯ»ќ§ќЋщ‘Џ§»§§§√§њ–¬§њ§ ’nо}§Ћ°Ґ–ƒјн—І§»ЩC–µє§—І§ќБI√ж§Ђ§й»°§кљM§у§«§§§л§ќ§ђЁзћпўF„”§ј°£

•–©`•Ѕ•г•л•к•Ґ•к•∆•££®VR£©§Ћ§™§±§л•Ґ•–•њ©`°щ1§Ђ§й°ҐяhЄф≤ў„ч•н•№•√•»°Ґ•¶•І•Ґ•й•÷•л•≥•у•‘•е©`•њ°Ґ„‘Д”№З§ќ∞л„‘Д”я\№Ю§Ћ÷Ѕ§л§ё§«°ҐIT§д•н•№•√•»°Ґ»Ћє§÷™ƒ№£®AI£©§ќЉ±Ћў§ ∞k’є§Ћ∞駧°Ґ»Ћйg§»ЩC–µ§»§ќ»ЏЇѕ§ђяM§у§«§§§л°£
ЩC–µ§»§ќ“їћеЄ–§д≈RИцЄ–°Ґ√ї»лЄ–§»§ѕЇќ§Ђ°£ЩC–µ§»§ќ»ЏЇѕ§Ћ§и§к°Ґ»Ћйg§ќ√Ч§д…нће§ѕ§…§ќ§и§¶§ ”∞нС§т №§±§л§ќ§Ђ°£љсбб°Ґ»Ћйg§»ЩC–µ§ѕ§…§ќ§и§¶§Ћ»ЏЇѕ§Ј§∆§§§ѓ§≥§»§ђЌы§ё§Ј§§§ќ§Ђ°™°£§≥§¶§§§√§њ’nо}§Ћ°ҐЁзћп§ѕ°Ґ–ƒјн—І§»ЩC–µє§—І§ќБI√ж§Ђ§й»°§кљM§у§«§§§л°£
§≥§м§ё§«•н•№•√•»§ѕЩC–µє§—І°ҐAI§ѕ«йИуњ∆—І§ќМЯйTЉ“§ђ÷––ƒ§»§ §√§∆—–Њњй_∞k§тяM§б§∆§≠§њ°£§Ј§Ђ§Ј°Ґљсбб°Ґ•н•№•√•»§дAI§ђќ“°©§ќ…ъїо§ќ÷–§Ћ…о§ѓ»л§кёz§я°ҐХr§Ћ»ЏЇѕ§Ј°Ґє≤іжє≤Ц—§тЗн§√§∆§§§ѓ§њ§б§Ћ§ѕ°ҐЩC–µє§—І§д«йИуњ∆—І§ј§±§«§ §ѓ°Ґ’J÷™њ∆—І§д√Чњ∆—І§ЋЉ”§®°Ґ’№—І§дЈ®—І°Ґ“љ—І§ §…§µ§ё§ґ§ё§ Ј÷“∞§ќМЯйTЉ“§ђЌђ§Є•∆©`•÷•л§Ћ§ƒ§≠°Ґќ“°©»ЋоР§ѕ“їће§…§ќ§и§¶§ ќіјі…зїб§тШЛЇB§є§ў§≠§Ђ§т“їЊw§Ћ§ §√§∆њЉ§®§∆§§§ѓ±Ў“™§ђ§Ґ§л°£°Єљс§ё§µ§Ћ§љ§ќХr∆Џ§Ћ§≠§∆§§§л§»Є–§Є§∆§§§ё§є°є§»Ёзћп§ѕ’Z§л°£
§љ§Ј§∆°Ґ°Є§≥§ќ•∆©`•ё§Ћ»°§кљM§а§њ§б§Ћ§ѕ°Ґ“Х“Щ°Ґі•“Щ§ЋЉ”§®°Ґ—џ§ќД”§≠§д ÷§ќД”§≠§ §…ће–‘Є–“Щ§»Їф§–§м§лЄ–“Щ§ќ3§ƒ§т—–Њњ§є§л±Ў“™§ђ§Ґ§к§ё§є°£§≥§м§й§є§ў§∆§тТQ§п§ §§§»°ҐЩC–µ§»§ќ“їћеЄ–§д≈RИцЄ–§тМgђF§є§л§≥§»§ђлy§Ј§§§ќ§«§ѕ§»„h’У§ђяM§у§«§§§л§Ђ§й§«§є°£ЩC–µє§—І§д«йИуњ∆—І§ќЈ÷“∞§«§ѕ°Ґ•ё•л•Ѕ•в©`•ј•л°щ3§д•ѓ•н•є•в©`•ј•л°щ4§»Їф§–§м§∆§§§ё§є°є§»’h√ч§є§л°£
§њ§»§®§–°ҐЁзћп§ђ§≥§м§ё§«»°§кљM§у§«§≠§њ°Є•≥•у•‘•е©`•њ•”•Є•з•у?•“•е©`•ё•у•”•Є•з•у°є§ѕ°Ґ»Ћйg§ќ—џ§ќ§Ј§ѓ§я§ќ—–Њњ§»°Ґ•н•№•√•»§д•≥•у•‘•е©`•њ§Ћ»Ћє§µƒ§Ћ•“•»§ќ—џ§ќ§и§¶§ ЋљM§я§тМgђF§µ§ї§л—–Њњ§ќЋЂЈљ§Ћїщ§≈§≠°Ґ„ояm§ “Х“ЩЩCƒ№£®ї≠ѕс’J„RДIјн£©§тњЉ§®§л§»§§§¶—–Њњ§ј°£
Мg§ѕ»Ћйg§ќ—џ§ѕ°Ґ’ж’э√ж÷–—л§ќ§і§ѓѕЅ§§є†Зм§ќ…Ђ§д–ќ§Ј§Ђ’эі_§Ћ§»§й§®§л§≥§»§ђ§«§≠§ §§°£§љ§м§Ћ§в§Ђ§Ђ§п§й§Ї°Ґ“Х“∞§ќ÷№ёx≤њ§ё§«§ѓ§√§≠§к“Х“∞§ђ“К§®§л§и§¶§ЋЄ–§Є§л§ќ§ѕ°Ґ“К§њ§§§»§§§¶“вЋЉ§д“вЗн§Ћ∞駶о^≤њ§д—џ«т§ќД”§≠§тјы”√§Ј§ §ђ§й°ҐЇќ§й§Ђ§ќ ЋљM§я§«√Ч§ђ”≥ѕс§т—aЌк§Ј§∆§§§л§Ђ§й§»њЉ§®§й§м§л°£°Є§≥§ќ ¬Мg§тƒж ÷§Ћ»°§л§≥§»§«°Ґя`ЇЌЄ–§ §ѓ“їћеЄ–§д≈RИцЄ–§тѕт…ѕ§µ§ї§л§≥§»§ђ§«§≠§л§ќ§«§є°є
VR§«•Ґ•–•њ©`§ §…§т≤ў„ч§є§лИцЇѕ°Ґ•к•в•≥•у§»•Ґ•–•њ©`§ќД”§≠§Ћ§Ґ§л≥ћґ»•Ї•м£®яW—”£©§ђ§Ґ§л§»°Ґ»Ћйg§ѕ“їћеЄ–§д≈RИцЄ–§ђЉ±Љ§§ЋµЌѕ¬§Ј§∆§Ј§ё§¶°£§љ§≥§«°Ґ•§•у•њ©`•Ќ•√•»§тљй§Ј§∆”≥ѕс§тЋЌ–≈§є§лИцЇѕ°Ґ»Ћйg§ќ—џ§ђ“К§∆§§§лоI”т§ѕЄяљвѕсґ»?•’•л•Ђ•й©`§«’эі_§Ћ±н Њ§Ј°Ґ§Ґ§ё§к“К§∆§§§ §§оI”т§ѕ§љ§≥§љ§≥§ќљвѕсґ»§д’эі_§µ§«ЋЌ–≈§є§л§≥§»§«°ҐяW—”§т“÷÷∆§Ј§ƒ§ƒ°Ґ“К§∆§§§л•“•»§Ћ§»§√§∆“їћеЄ–§д≈RИцЄ–§тЊS≥÷§є§лї≠ѕсћб ЊЈљЈ®§ђ—–Њњ§µ§м§∆§§§л°£

°Є•Ґ•§?•»•й•√•≠•у•∞°є§»Їф§–§м§лЉЉ–g§т є§√§∆°Ґ»Ћйg§ќ—џ§ќ÷––ƒ“Х“∞§»÷№ёx“Х“∞§ЋЃР§ §л”≥ѕс§т“К§ї§лМgтY§ќШФ„”°£»Ћйg§ќ—џ§ѕ“ХЊА§ќ÷––ƒ§д„Ґ“в§тѕт§±§∆§§§л§»§≥§н§ќљь§ѓ§ѕ’эі_§Ћ’J„R§«§≠§л§ђ°Ґ§љ§ќ÷№§к§ѕ”а§к“К§®§∆§§§ §§њ…ƒ№–‘§ђ§Ґ§л°£§Ј§Ђ§Ј§љ§м§т∆’ґќ§ќ…ъїо§«„‘“Щ§є§л§≥§»§ѕ…ў§ §§§њ§б°Ґ“ХЊА§тѕт§±§њ§»§≥§н§ќ÷№§к§Ћ§ј§±ќƒ„÷§т”≥§Ј≥ц§Ј§њ§к£®÷––ƒ“Х•ё•є•ѓ£©°Ґƒж§Ћ“ХЊА§тѕт§±§њ§»§≥§н§ќ÷№§к§Ћ§ј§±ќƒ„÷§«§ѕ§ §§§в§ќ§т”≥§Ј≥ц§Ј§њ„іСB£®÷№ёx“Х•ё•є•ѓ£©§«ќƒ’¬§т’i§у§«§в§й§¶°£„‘Ј÷§ђ§…§м§ѓ§й§§“Х“∞§ќ÷––ƒ§ј§±§«ќƒ„÷§т’i§у§«§§§∆°Ґ§љ§м“‘Ќв§ќ“Х“∞§т“К§∆§§§л§ƒ§в§к§«§в’эі_§Ћ“К§∆§§§ §§§Ђ§ђћеЄ–§«§≠§л°£
“їЈљ°ҐђF‘Џ°ҐЁзћп§ђ°Ґ»’±Њ“љѓЯ—–Њњй_∞kЩCШЛ§ђ÷чія§є§л°Ї√Ч§»§≥§≥§н§ќљ°њµіуєъМgђF•„•н•Є•І•ѓ•»![]() °ї§«„ҐЅ¶§Ј§∆§§§л§ќ§ђ°Ґ°Є•—•п©`•µ•Ё©`•»•н•№•√•»°є§ј°£
°ї§«„ҐЅ¶§Ј§∆§§§л§ќ§ђ°Ґ°Є•—•п©`•µ•Ё©`•»•н•№•√•»°є§ј°£
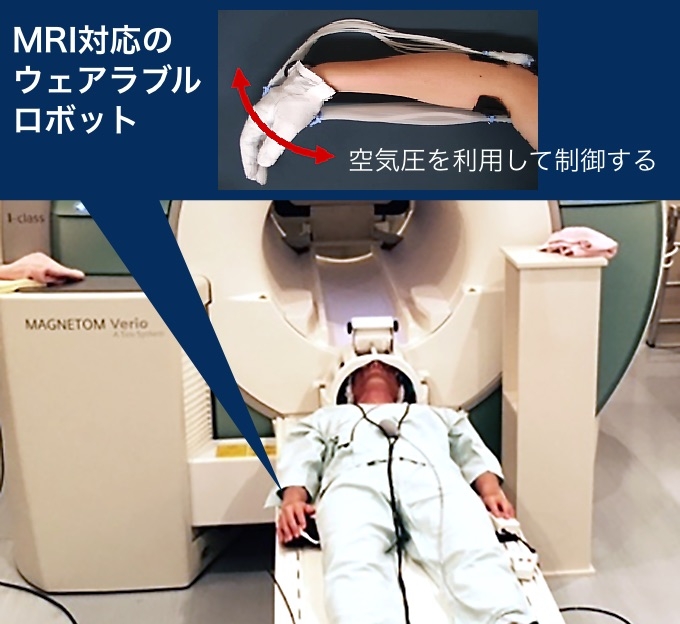
§≥§м§ѕ°Ґ»Ћйg§ђ„∞„≈§є§л§≥§»§«°Ґ…нће§ќД”§≠§т•µ•Ё©`•»§є§л•¶•І•Ґ•й•÷•л•н•№•√•»§«°ҐљЂјіµƒ§Ћ§ѕ°Ґ…нће§д√Ч§Ћ’ѕЇ¶§тЎУ§√§њ»Ћѕт§±§ќ“љѓЯЩC∆ч§тѕлґ®§Ј§∆§§§л°£ђF‘Џ§ќ§»§≥§н°ҐД”§≠§ѕ•≥•у•‘•е©`•њ§«÷∆”щ§Ј§∆§§§л§ђ°Ґљсбб°Ґ±Ў“™§ЋПк§Є§∆°Ґ•÷•м•§•у?•ё•Ј•у?•§•у•њ©`•’•І©`•є°щ5§дљолКЅx ÷§ќ§и§¶§Ћ°Ґ√Ч≤®§дљолКќї§т є§√§њ÷∆”щ§Ћ§в‘≠јн…ѕМЭПк§ѕњ…ƒ№§»§§§¶°£
°ЄЋы§ќ•¶•І•Ґ•й•÷•л•н•№•√•»§»§ќ„о§віу§≠§ я`§§§ѕ°Ґ•—•п©`•µ•Ё©`•»•н•№•√•»§т„∞„≈§Ј§ §ђ§й°ҐfMRI£®і≈ЪЁє≤шQЩCƒ№ї≠ѕсЈ®£©§«°Ґ•к•Ґ•л•њ•§•а§Ћ√Ч§ќ—™Ѕч§ќ„іСB§т”ЛЬy§«§≠§л§≥§»§«§є°£§љ§м§Ћ§и§к°Ґ•н•№•√•»§ђ„∞„≈’я§ќ“в÷Њ§д“вЗн§ќЌ®§к§ЋД”„ч§Ј§∆§§§л§»§≠§»°Ґ“в÷Њ§д“вЗн§ЋЈі§Ј§∆Д”„ч§Ј§∆§§§л§»§≠§ќ√Ч§ќ„іСB§ќя`§§§ђЈ÷§Ђ§к§ё§є°£•н•№•√•»§ђ»Ћйg§ќЄ–“Щ§д√Ч§Ћ”맮§∆§§§л”∞нС§тґ®Ѕњїѓ§є§л§≥§»§ђ§«§≠§л§ќ§«§є°є
„≈§њ§ё§ё√Ч§ќ„іСB§ђ”Л§м§л•—•п©`•µ•Ё©`•»•н•№•√•»
•—•п©`•µ•Ё©`•»•н•№•√•»§тМgлH§Ћ„≈”√§Ј§∆§§§л•“•»§ќ√ЧїоД”§тfMRI§«ійѕс§Ј§њ§в§ќ£®•н•№•√•»§ђ„‘Ј÷§ќ“вЋЉ§д“вЗнЌ®§к§ЋД”§§§∆§§§ §§§»§≠§ќ√ЧїоД”§т Њ§Ј§∆§§§л£©
§≥§ќґј„‘§ќ•—•п©`•µ•Ё©`•»•н•№•√•»§ѕ°Ґ є§—І‘Ї ЩC–µѕµ§ќвП…≠њµ“їљћ Џ§ђй_∞k§Ј§њ»Ћє§љо»в§тПк”√§Ј§∆§§§л°£Ќ®≥£°Ґ•н•№•√•»§ќ•Ґ•ѓ•Ѕ•е•®©`•њ£®сlД”„∞÷√£©§Ћ§ѕљр ф§ђ є§п§м§∆§§§л§ђ°ҐfMRI§Ћ є§п§м§лMRI„∞÷√§ѕПКі≈Иц§ќ§њ§б°Ґљр ф§т„∞„≈§Ј§њ„іСB§«°ҐMRI„∞÷√§ќ÷–§Ћ»л§л§≥§»§ѕ§«§≠§ §§°£§љ§м§ЋМЭ§Ј°Ґ•љ•’•»•Ґ•ѓ•Ѕ•е•®©`•њ§ѕ°Ґ•Ј•к•≥©`•у—u§ќњНЊS§«§«§≠§∆§§§л§њ§б°Ґ„∞„≈§Ј§њ§ё§ёMRI„∞÷√§Ћ»л§л§≥§»§ђ§«§≠§л…ѕ§Ћ°ҐЄяі≈Иц§«§вЖЦо}§ §ѓД”„ч§є§л§ќ§ђћЎП’§ј°£
•љ•’•»•Ґ•ѓ•Ѕ•е•®©`•њ§ѕ°Ґ•Ј•к•≥©`•у—u§ќњНЊS§«§«§≠§∆§§§∆°Ґ÷–§Ћ§ѕЉЪ§§•Ѕ•е©`•÷§ђЌ®§√§∆§§§л°£§≥§ќ•Ѕ•е©`•÷§ќ÷–§Ћњ’ЪЁ§т≥ц§Ј»л§м§є§л§≥§»§«°Ґ•љ•’•»•Ґ•ѓ•Ѕ•е•®©`•њ§т…мњs§µ§ї°Ґ…нће§ќ«ъ§≤…м§–§Ј§т•µ•Ё©`•»§Ј§∆§§§л°£
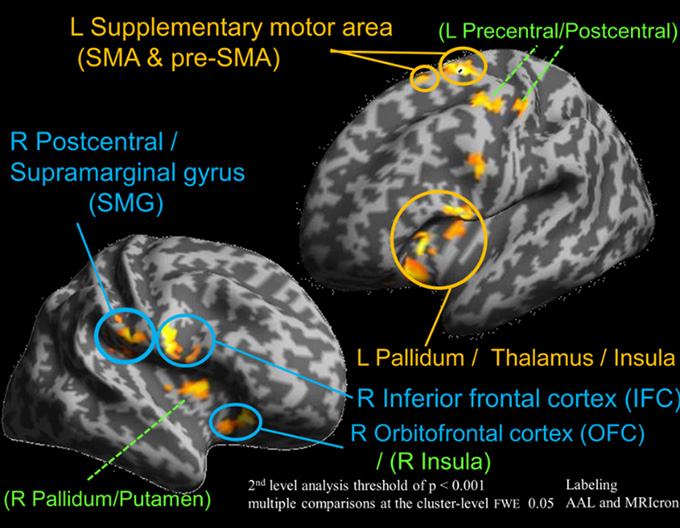
fMRI§Ћ§и§л•«©`•њљвќц§ЋЉ”§®°Ґ»Ћйg§ќЄ–“Щ§дЄ––‘§тњ∆—Іµƒ§ ЈљЈ®§«ґ®Ѕњїѓ§«§≠§л§ќ§в°ҐЁзћп§ќПК§я§ј°£
°Є°Ї–ƒјнќпјн—ІµƒЬyґ®ЈљЈ®°ї§»Їф§–§м§л ÷Ј®§т є§√§∆§§§ё§є°£–ƒјн—І§ќЈ÷“∞§«§ѕ°Ґ§…§ќ§и§¶§ ќпјнµƒ«йИу§т”맮§м§–°Ґ»Ћйg§Ћ§…§ќ§и§¶§ Є–“Щ§ђ∞k…ъ§є§л§Ђ§»§§§¶ќпјн§»–ƒјн§ќМЭПкйvВS§ђ—–Њњ§µ§м§∆§§§ё§є°є
§њ§»§®§–°Ґ≤ў„ч§Ј§∆§§§л•н•№•√•»§ќД”§≠§ђ300•я•к√л£®0.3√л£©яW§м§л§ј§±§«°Ґ»Ћйg§ѕ•н•№•√•»§»§ќ“їћеЄ–§тЄ–§Є§ §ѓ§ §л§≥§»§ђ°Ґ§≥§¶§§§√§њЬyґ®ЈљЈ®§Ђ§й√ч§й§Ђ§Ћ§ §√§∆§§§л§»§§§¶°£
°Є»Ћйg§»ЩC–µ§ђ»ЏЇѕ§є§л§њ§б§Ћ§ѕ°Ґ»Ћйg§ђ§љ§м§т∞≤»Ђ?њмяm§Ћ≤ў„ч§«§≠§л§Ђ°Ґ»Ћйg§ђБї§®§њ§§«йИу§ђ§и§к’эі_§ЋБї§п§√§∆§§§л§Ђ§тЧ ‘^§є§л§≥§»§ђ÷Ў“™§«§є°£§љ§ќ§њ§б°ҐЋљ§ќ—–Њњ “§«§ѕ°ҐЩC–µ§т’J÷™њ∆—І§д√Чњ∆—І§ќ•м•ў•л§ё§«яi§√§∆°ҐЧ ‘^§Ј§и§¶§»§Ј§∆§§§л§ќ§«§є°£§љ§м§Ћ§и§√§∆≥х§б§∆°Ґ„‘Ј÷§ќ…нће§ќ“ї≤њ§ќ§и§¶§ ≤ў„ч–‘§т≥÷§ƒ•—•п©`•µ•Ё©`•»•н•№•√•»§тМgђF§«§≠§л§»њЉ§®§∆§§§ё§є°є
•н•№•√•»§дAI§»§ќє≤іж§вЁзћп§ќ÷Ў“™§ —–Њњ•∆©`•ё§ј°£ђF‘Џ°Ґњ∆—ІЉЉ–g’с≈dЩCШЛ£®JST£©§ќ…зїбЉЉ–g—–Њњй_∞k•ї•у•њ©`§ђЌ∆яM§є§л—–Њњй_∞kоI”т°Ї»Ћ§»«йИу§ќ•®•≥•Ј•є•∆•а![]() °ї§ќ•„•н•Є•І•ѓ•»§Ћ≤ќї≠§Ј°ҐЈ®—І’я§д’№—І’я§»§ќє≤Ќђ—–Њњ§тяM§б§∆§§§л°£
°ї§ќ•„•н•Є•І•ѓ•»§Ћ≤ќї≠§Ј°ҐЈ®—І’я§д’№—І’я§»§ќє≤Ќђ—–Њњ§тяM§б§∆§§§л°£
°Є•„•н•Є•І•ѓ•»§«§ѕ°ҐAI§дAI§тіоЁd§Ј§њ•н•№•√•»§ђЋЉ§п§ћ ¬Љю§д ¬є §т∆р§≥§Ј§њИцЇѕ°Ґ•б©`•Ђ©`°Ґ•ж©`•ґ©`°ҐAI§ќ§§§Ї§м§ђЎЯ»ќ§тЎУ§¶§ў§≠§Ђ§»§§§¶’nо}§Ћ§ƒ§§§∆°Ґ„h’У§т÷Ў§Ќ§∆§§§л§»§≥§н§«§є°є
§ё§Ї°Ґ•б©`•Ђ©`§ЋЎЯ»ќ§тЎУ§п§ї§л§»§§§√§њИцЇѕ°Ґіќ§ќ§и§¶§ ’nо}§ќ∞k…ъ§ђњЉ§®§й§м§л§»§§§¶°£°Є•®•у•Є•Ћ•Ґ§Ћ§»§√§∆AI§д•н•№•√•»§ќй_∞k§ѕ•к•є•ѓ§т∞駶§в§ќ§Ћ§ §к§Ђ§Ќ§ §§§њ§б°ҐAI§д•н•№•√•»ЃbШI»Ђће§ќќЃњs§Ћ§ƒ§ §ђ§лњ…ƒ№–‘§ђ”иѕл§µ§м§ё§є°£§ё§њ°ҐAI§ѕ•ж©`•ґ©`§тЌ®§Ј§∆ЩC–µ—ІЅХ§Ј°ҐЙдїѓ§Ј§∆§§§ѓ§ќ§«°Ґ•б©`•Ђ©`§Ћ§є§ў§∆§ќЎЯ»ќ§тЎУ§п§ї§л§ќ§ѕ§™§Ђ§Ј§§§»§§§√§њ“в“ʧ⧥§к§ё§є°є
§µ§й§Ћ°Ґ•¶•І•Ґ•й•÷•л•н•№•√•»§д„‘Д”№З§ќ∞л„‘Д”я\№Ю§ќИцЇѕ°Ґ»Ћйg„‘…н§ќ…нће§д„‘Д”№З§»§§§¶1§ƒ§ќМЭѕу§ЋМЭ§Ј§∆°Ґ»Ћйg§»»Ћє§µƒ§ ≈–ґѕ•Ј•є•∆•а(AI§тЇђ§а)§»§§§¶2§ƒ§ќо^√Ч§ђ÷∆”щ§є§л§≥§»§Ћ§ §л°£»Ћйg§»AI§»§«§ѕ°Ґ≥£§Ћ≈–ґѕ§ђ“ї÷¬§є§л§»§ѕѕё§й§ §§°£§…§Ѕ§й§тГЮѕ»§є§ў§≠§Ђ§ѕ°ҐЈ«≥£§Ћ§а§Ї§Ђ§Ј§§ЖЦо}§ј°£§љ§м§Ћ§и§√§∆ЎЯ»ќ§ќЋщ‘Џ§вЙд§п§√§∆§ѓ§л°£
§љ§в§љ§вAI§д•н•№•√•»§ЋЎЯ»ќ§тЎУ§п§ї§л§»§§§¶§ќ§ѕ°Ґњ…ƒ№§ §ќ§ј§н§¶§Ђ°£
°ЄђF‘Џ°ҐAI§д•н•№•√•»§ђ§…§м§ѓ§й§§§ќƒ№Ѕ¶§т≥÷§ƒ§и§¶§Ћ§ §м§–°ҐЈ®¬……ѕ°Ґ»Ћйg§»µ»Бэ§ЋТQ§¶§≥§»§ђ§«§≠§л§ќ§Ђ°£§љ§м“‘«∞§Ћ°ҐAI§д•н•№•√•»§Ћ≥£„R§дЄ–«й§т≥÷§њ§ї§л§≥§»§ѕ§«§≠§л§ќ§Ђ°£§Ґ§л§§§ѕ°Ґ≥÷§њ§ї§л§ў§≠§ §ќ§Ђ§ §…„h’У§ѕЊ°§≠§ё§ї§у°£§љ§ќ“їЈљ§«°Ґ°ЇЎЯ»ќ§ќ„ЈЉ∞§ѕљьіъ§ќќч—у…зїб§ќ±»Ё^µƒ–¬§Ј§§њЉ§®Јљ§ќ“ї§ƒ§Ћя^§Ѓ§ §§°ї§»§ќњЉ§®§ќѕ¬°ҐЎЯ»ќ§ќЋщ‘Џ§т„Ј«у§є§л§≥§»§ §ѓ°ҐAI§д•н•№•√•»§Ћ§и§л ¬Љю§д ¬є §тљвЫQ§є§л§њ§б§ќ–¬§њ§ ЈљЈ®§тћб∞Є§є§лД”§≠§в Љ§ё§√§∆§§§ё§є°є
љьƒк°Ґ°Є•Ј•у•Ѓ•е•й•к•∆•£°щ6°є§»§§§¶—‘»~§тоlЈ±§Ћґъ§Ћ§є§л§и§¶§Ћ§ §л÷–°Ґ»Ћйg§»ЩC–µ§»§ќ»ЏЇѕ°Ґ»Ћйg§»•н•№•√•»§дAI§»§ќє≤іж§Ћѕт§±§∆°ҐљвЫQ§є§ў§≠’nо}§ѕ…љЈe§Ј§∆§§§л§»§§§¶„іЫr§ј°£
°Є§≥§ќ§и§¶§ ’nо}§тљвЫQ§є§л§Ћ§ѕ°ҐЈ®—І’я§д’№—І’я°Ґ…зїб—І’я§ќ“Хµг§ј§±§«§ѕ§ §ѓ°Ґ»Ћйg§ќ√Ч§д–ƒјн§Ў§ќ”∞нС§тњ∆—Іµƒ“КµЎ§Ђ§йљв√ч§є§л§≥§»§ђ±Ў“™§ј§»ЋЉ§√§∆§§§ё§є°є§»’Z§лЁзћп°£
„обб§Ћ°Ґ—І…ъ°Ґ»ф ÷—–Њњ’я§Ћ•б•√•ї©`•Є§тЋЌ§√§∆§ѓ§м§њ°£°Єґа§ѓ§ќ»ф’я§ђ°Ґќƒѕµ§Ђјнѕµ§Ђ°Ґє§—Іѕµ§Ђјн—Іѕµ§Ђ§ §…Ћщ ф§є§лЈ÷“∞§дљMњЧ§тЪЁ§Ћ§є§лГAѕт§Ћ§Ґ§л§и§¶§ЋЄ–§Є§∆§§§ё§є°£§Ј§Ђ§Ј§Ґ§ё§к§љ§м§Ћ„љ§п§м§л§≥§»§ §ѓ°Ґ„‘Ј÷§ѕЇќ§Ћ≈dќґ§ђ§Ґ§к°Ґ»Ћ…ъ§тўА§±§∆Їќ§т„Ј«у§Ј§њ§§§ќ§Ђ§т§Ј§√§Ђ§к§»“Кґ®§б§∆§џ§Ј§§§»ЋЉ§§§ё§є°£§љ§ќƒњШЋя_≥…§дљYєы§ќ±нђFЈљЈ®§ђ°ҐЋљ§ќ§и§¶§Ћ»Ћйg§ќЄ–“Щ÷™“Щ§тТQ§¶оI”т§«§ѕњ∆—І’я§ќ§я§»§ѕѕё§й§ §ѓ§ §√§∆§≠§∆§™§к°Ґ∆рШI§Ј§њ§к°Ґ•б•«•£•Ґ•Ґ©`•∆•£•є•»§дќƒєPЉ“§»§Ј§∆…зїб§Ћ±нђF§Ј§∆§§§ѓ»Ћ§вЙИ§®§∆§§§ё§є°£„‘Ј÷§т–°§µ§ ЦШљM§я§ќ÷–§Ћй]§Єёz§б§∆њ…ƒ№–‘§тѕЅ§б§л§≥§»§ §ѓ°Ґ„‘Ј÷§ §й§«§ѕ§ќЈљЈ®§«°Ґ„‘§йТч§≤§њƒњШЋ§тя_≥…§Ј§∆§џ§Ј§§§«§є§Ќ°є

Ёзћп—–Њњ “§ќ•б•у•–©`
„‘ЉЇ£®•ж©`•ґ©`£©§ќЈ÷…н§»§ §л•≠•г•й•ѓ•њ©`§ќ§≥§»§«°Ґ•Ґ•–•њ©`јы”√’я§«§Ґ§л•ж©`•ґ©`§Ћƒ£§Ј§њ„Ћ§Ћ§є§лХr§в§Ґ§л§ђ°Ґ§Ґ§®§∆–‘Дe§д„Ћ§тЙ䧮§∆Дe§ќ„‘ЉЇ§Ћ§ §к§≠§лИцЇѕ§в§Ґ§л°£
ЩC∆ч§д•љ•’•»•¶•І•Ґ°Ґ•Ј•є•∆•а§ §…§»§љ§ќјы”√’я§ќйg§««йИу§т§д§к»°§к§є§л ЋљM§я°£
“Х“Щ§д¬Ч“Щ°Ґі•“Щ°Ґ–б“Щ§»§§§√§њќеЄ–§ќ÷–§ќ§…§м§Ђ“ї§ƒ§ј§±§«§ѕ§ §ѓ°Ґ§љ§м§й§ќљM§яЇѕ§п§ї§д°Ґ§љ§≥§Ћће–‘Є–“Щ£®∆љЇвЄ–“Щ°Ґњ’йgЄ–“Щ§ §…£©§тљM§яЇѕ§п§ї§њ—} эЄ–“Щ§тЈeШOµƒ§Ћ»°§к»л§м§лњЉ§®Јљ§ќ§≥§»°£
“Х“Щ§»¬Ч“Щ°Ґ“Х“Щ§»і•“Щ°Ґќґ“Щ§»і•“Щ§ §…°Ґ—} э§ќЃР§ §лЄ–“Щ•в•ј•к•∆•£§Ђ§й§ќ«йИу§ђї•§§§Ћ”∞нС§тЉ∞§№§ЈЇѕ§¶§≥§»°£
°щ5 •÷•м•§•у?•ё•Ј•у?•§•у•њ©`•’•І©`•є
√Ч≤®µ»§ќ√Ч«йИу§ќЧ ≥ц?≥й≥ц§д°Ґƒж§Ћ√Ч§Ў§ќіћЉ§§ §…§»§§§√§њ ÷Ј®§Ћ§и§к°Ґ√Ч§»•≥•у•‘•е©`•њ§тЇђ§аЌв≤њЩC∆ч§т§ƒ§ §∞•§•у•њ©`•’•І©`•єЉЉ–g§дЩC∆чµ»§ќЊt≥∆°£
»Ћє§÷™ƒ№£®AI£©§ђ»ЋоР§ќ÷™ƒ№§т≥ђ§®§л№ЮУQµг£®ЉЉ–gµƒћЎЃРµг£©°£§ё§њ§ѕ°Ґ§љ§м§ђ§в§њ§й§є јљз§ќЙдїѓ§ќ§≥§»°£

ЁзћпўF„”£®Takako Yoshida£©
є§—І‘Ї ЩC–µѕµ „Љљћ Џ

є§—І‘Ї ®D–¬§њ§ ЃbШI§»ќƒ√ч§тЌЎ§ѓ—ІЖЦ®D
2016ƒк4‘¬§Ћ∞k„г§Ј§њє§—І‘Ї§Ћ§ƒ§§§∆љBљй§Ј§ё§є°£

•є•Џ•Ј•г•л•»•‘•√•ѓ•є§«§ѕ±Њ—І§ќљћ”э—–Њњ§ќ»°љM§д»Ћќп°Ґ•Ћ•е©`•є°Ґ•§•ў•у•»§ §…—Ѓ§ ‘То}§тґ®∆Џµƒ§ ’i§яќп§»§Ј§∆•‘•√•ѓ•Ґ•√•„§Ј§∆§§§ё§є°£SPECIAL TOPICS GALLERY §Ђ§йя^»•§ќ§є§ў§∆§ќ”Ы ¬§т§і”E§§§њ§ј§±§ё§є°£
2018ƒк6‘¬ТчЁd

![]()
© Tokyo Institute of Technology. All rights reserved.
![]()